The UKRI Centre for Doctoral Training in Foundational AI were delighted to welcome our third cohort of students at the start of term. We are now training 33 PhD students in foundational artificial intelligence, helping to create new algorithms and AI coding to help answer some of society’s biggest needs.
We have slowly started to return to the Centre for Artificial Intelligence at 90 High Holborn and the purchase of a table tennis table and a table football table has certainly provided some welcome light relief between serious study. The idea of league tables and leader boards has been mooted, so watch this space!
We are incredibly proud of our space in Holborn and the CDT itself and have been working with UCL media services to create a promotional video, highlighting the CDT and AI Centre. We were incredibly fortunate to have students and staff give up their time to share their experiences and journey at UCL and are really excited to see the finished product.
One of the aims of the video is to encourage new applicants from existing MSc students around the United Kingdom. The UKRI Centre for Doctoral Training in Foundational AI is funded by the EPSRC and aims to create the next generation of UK AI creators and innovators. The UK government has released an ambitious National AI Strategy of building upon our rich cultural history in machine learning to lead the field of next generation AI and AI driven industry. Applications are now being accepted for the 2022 entry, so please do share this information with any interested parties.
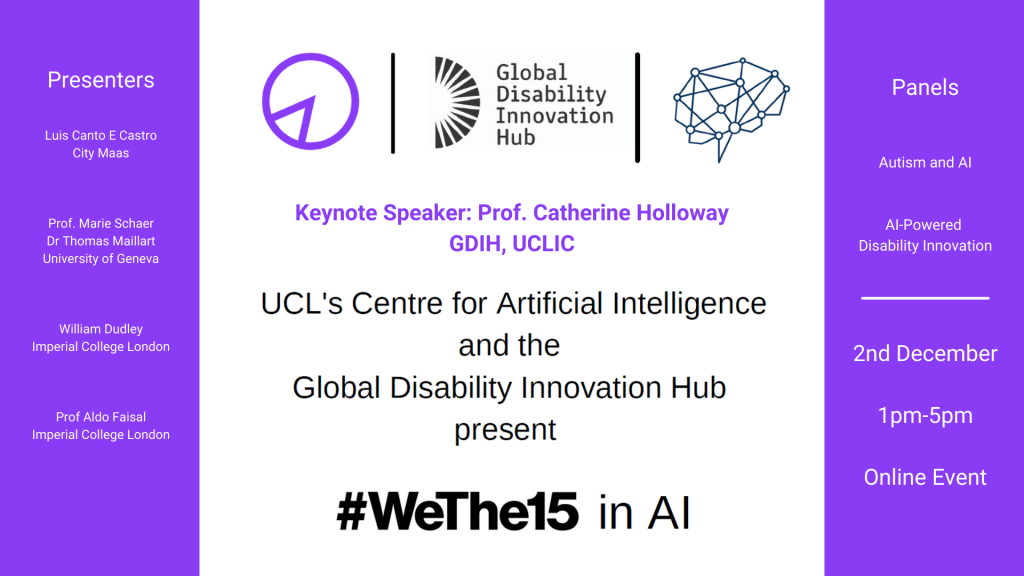
What makes the CDT stand out from other PhD providers is the cohort activities and events that are planned throughout the year for our students. These include weekly seminars with guest speakers, workshops, training, internship opportunities and equality, diversity and inclusion events. This calendar year we have put on event to celebrate the LGBTQ+ community, Women in AI, supporting the black community in AI and we end with #WeThe15 in AI, an event to raise the voices of those within the disabled community.
Our event will take place virtually on 2nd December from 1pm-5pm and tickets are available now via Eventbrite: https://www.eventbrite.co.uk/e/207803364457
We are delighted to provide a platform for those who have lived experiences as part of the disabled community, as well as those doing ground-breaking research to provide technological solutions to human problems.
Our keynote speaker is Professor Catherine Holloway (UCL), Academic Director, Global Disability Innovation Hub.
Schedule of events
13:00 Welcome
13:05 Presentation by Luis Canto E Castro from City Maas – a company that uses AI to help wheelchair users navigate city landscapes
13:30 Presentation William Dudley, Imperial College London – An AI research student at Imperial College London who has cerebral palsy and will share his lived experience as a member of the disabled community and researching in AI
13:55 Presentation Prof Marie Schaer & Dr Thomas Maillart, University of Geneva – Looking at their recent paper using AI image processing to help diagnose autism in young children.
14:20 Panel -Autism and AI
Chair Alice Renard, Autistic Society, UCL
Panellists: Suzanna Chen (Autistic Society, UCL), Luke Muschialli (Autistic Society, UCL), Dr Larissa Romualdo Suzuki (Head of Data and AI, Google Cloud), Dr Joe Mintz (Institute of Education, UCL), Prof Marie Schaer (University of Geneva) and Dr Thomas Maillart (University of Geneva)
15:15 Key Note: Prof Catherine Holloway, UCL – “Disability Innovation: AI and Assistive Technologies”
15:40 Panel: AI-Powered Disability Innovation
Chair: Daniel Hajas, GDI Hub Innovation Manager at GDI Hub
Panellists: Mr Klaus Höckner, CEO, Austrian Association for Blind and Visually Impaired, Mr Bernard Chiira, Director at Innovate Now, Co-Founder Inclusive Education Network, Prof Aldo Faisal, Imperial College London
More panellists TBC
16:35 Presentation by Prof Aldo Faisal, Imperial College London – “AI for Disabilities: from Assistive Technology to Human Augmentation”
17:05 Closing remarks
Please do register for this event and let us know what other events you would like us to share with you.
 Close
Close